Below are a list of technical White Papers written by Galil Applications Engineers.
[White Paper] Advanced Control Techniques for Real World Drivetrains
The goal of a mechanical system built for motion control is to accurately move or position a load. In an ideal system, the load is rigidly coupled to, and directly driven by, a linear or rotary motor. There are many systems for which this drive method is not an option and a drivetrain is required to drive the load. Some common drivetrains include:
- Ball or lead screws
- Belt and pulley
- Chain and sprocket
- Gear trains or rack & pinion
- Hydraulics
[White Paper] Advanced Applications of Electronic Gearing Part 3
Part 3 of 3: Superposition of Motion Profiles
Introduction
This is the final paper of three delving into advanced electronic gearing topics in motion control. The first two, Tension Control on Spindle Wheel and Positional Correction on Color Print Rollers in Offset Printing, dealt with both low and high bandwidth corrections by correcting for frequency and phase.
This paper will cover how to apply electronic gearing to superimpose two motion profiles for a single axis. Three different examples will be discussed showing the many different applications where adding two motion profiles together can simplify the system’s design.
Example 1: Writing on a cake that is moving on a conveyor
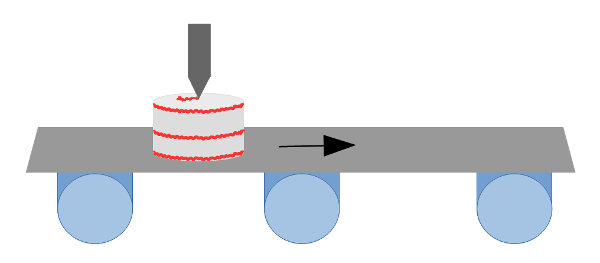
Figure 1: Cake writing on a moving conveyor
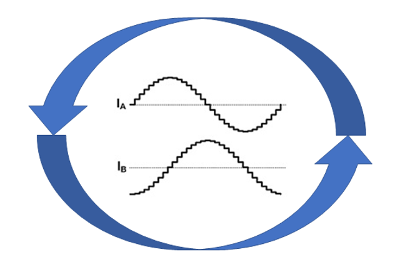
[White Paper] Transconductance vs Voltage Amplifiers
The purpose of an amplifier in a motion control system is to provide a controlled amount of current or voltage to a motor based on a command signal from the motion controller. This is done by a current (transconductance) or voltage amplifier. Each of these two type of amplifiers has benefits and drawbacks which must be considered in order to choose the correct structure for a given motion control application. This paper will examine the similarities and differences between the two main types of switching amplifiers by addressing three key areas: performance, safety, and efficiency.

Figure 1: Typical H-Bridge Circuit of Switching Amplifier