Below are a list of technical White Papers written by Galil Applications Engineers.
[White Paper] The Effects of Amplifier Resolution on Servo Motor Control
With continued miniaturization, the requirements for sub micron control of high bandwidth, high resolution, low inertia systems are becoming more and more stringent. To match this demand, the motion control industry has steadily moved to more powerful and higher resolution platforms. This iterative process has continued to drive improvements in the PID control loop and its capabilities from 8 bit systems in the 1980's to today's 16 to 32 bit architectures. Any control system however is only as capable as it's 'weakest' component. 20 bit encoders, 32 bit processors and 16 bit DACs are of limited benefit when the resolution of the amplifier is typically limited to only 12 bits. A 16 bit amplifier with the same high PWM frequency of a 12 bit allows for the full performance capabilities of a modern control system.
[White Paper] Introducing Galil's New H-bot Firmware
Video 1: Galil's New H-bot Firmware in Action.
There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with additional motors to increase the number of degrees of freedom. These types of applications can range from specimen positioning for a microscope and 3D printers to product packaging and material application. The most common way that planar motion is achieved is using a machine based on the XY stage or gantry system. This type of system can have many drawbacks which will be outlined later in this article. An alternative to these types of machines is the H-Bot which has many advantages when compared to XY stages or gantries. This article will discuss the advantages and disadvantages of using an H-Bot for systems that use planar movement as well as Galil's H-Bot firmware solution for the DMC-40x0.
[White Paper] Intro to Motion Control Systems
A motion control system is a collection of components put together in such a way that creates movement to a specific position, velocity, or acceleration. A closed loop motion control system consists of a motor, amplifier, motion controller, and feedback sensor.
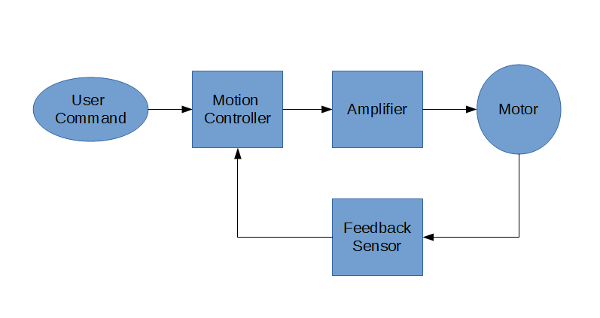
Figure 1. Motion Control System Block Diagram
[White Paper] Closed-Loop Stepper Motor Performance Gains
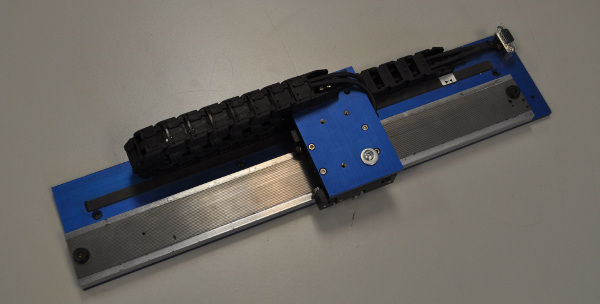
Figure 1 - Linear stepper motor
Modern motion controllers can include the ability to run stepper motors with encoder feedback, resulting in true closed-loop motion control. This mode of motor control is very similar to standard three-phase brushless servo motor control, where the three phases are offset 120 electrical degrees. With steppers, the motor has two phases offset by 90 electrical degrees. The benefits of closed-loop control with stepper motors include greatly improved velocity smoothness and reduced power consumption compared to open-loop steppers and much higher torque at low velocity compared with traditional three-phase brushless servo motors.