Ethernet was developed in the 1970’s and was started being used commercially in the 1980’s. By the end of the 1980’s, it was the dominant network technology. It was initially used to connect computer systems and peripherals in a Local Area Network (LAN) and quickly evolved to be the protocol used for Wide Area Networks (WAN). Then came the world wide web and the incorporation of the internet into every aspect of communication.
In the mid to late 1990’s, Ethernet’s popularity spread to control systems. The engineering team here at Galil Motion Control determined Ethernet was a viable protocol in 1999 and introduced its first Ethernet Motion Controller. Even today, Ethernet is the most popular method of network communication in control systems.
Before Ethernet
Before Ethernet was considered viable for control systems, several other communication protocols were popular.
• Bus-Based communication was used when the controller lived within the computer. This solution was often cumbersome because the computer had to be large enough to house the motion controller, and the computer had to be and very close to the often noisy, dirty machine.
• Daisy-Chain serial communication allows for distributed systems. The network was a series of controllers with a master. The master transmitted packets to the first device. The first device read the packet address, kept the packet if appropriate, or sent it on if it was addressed to another controller. This solution was very slow at the typical 9600 baud rate.
• RS-485 multi-drop allowed data to be received by multiple motion controllers at the same time, but the speed was also slow, and the packet size was small.
• Various proprietary serial communication networks became popular. These protocols were useful when data was short, repetitive and simple. Some of them are still used in some control systems today.
Proprietary serial communication protocols such as CANopen, Profibus, MultiNet, and DeviceNet were developed because motion control systems needed more intelligence than bus-based and primitive serial networks could provide. These protocols needed to be able to take advantage of increasingly capable motion system hardware. Because these protocols were proprietary and part of a ‘turn-key’ solution, they were also expensive and created a barrier to migration. Customers were locked into a single hardware and software vendor and support for these solutions had to come straight from the supplier.
By the 1990’s, Ethernet provided an alternative to proprietary bus communication because it was scalable, affordable, and flexible. Ethernet became ubiquitous. Compatible hardware was easy to source and relatively inexpensive so it proliferated quickly. But there were still some questions whether a non-deterministic protocol like Ethernet was viable for motion control systems.
Non-Deterministic and Deterministic Networks
What is the difference between a non-deterministic and a deterministic network? A Non-deterministic network allows any device on the network to transmit at any time. Many masters and many slaves can exist, the network can be closed (not connected to the outside) or open (connected to the outside like the Internet). The drawback to a non-deterministic network is the possibility of packet collisions. Collisions occur if more than one device transmits at the same time. TCP/IP over Ethernet is an example of a non-deterministic network protocol.
A Deterministic network has a guaranteed ‘same time’ delay for data transfer. A deterministic network has one master and many slaves. A drawback to a deterministic network is if the given time to transmit isn’t used, it is lost. CANopen and EtherCAT are examples of deterministic protocols.
The real question is: Are collisions in a closed, non-deterministic network relevant to control systems? Collisions occur if two devices transmit at exactly the same time, which is uncommon even on open networks where there are an indefinite number of devices and data being transmitted. So it is extremely unlikely that collisions will cause problematic delays for control systems when they are non-deterministic closed networks.
There are some instances when a deterministic network is important for transmitting data in control systems. A good example is closing a servo loop across the wire. In this case, it’s very important for the data to arrive at the same time, every time. Some motion controller vendors, like Galil, design their motion controllers so they close the servo loop inside the controller. This is one reason why a deterministic network is not vital to applications using Galil’s motion controls.
Ethernet Options for Control Systems
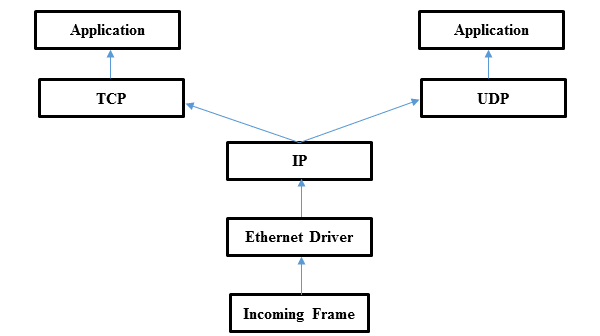
Two common Ethernet protocols are User Datagram Protocol UDP/IP and Transmission Control Protocol (TCP/IP). UDP/IP is the simplest means of Ethernet communication. There isn’t a connection establishment so there is little handshaking between the master and slaves, and the transmitting device doesn’t require a receipt acknowledgment, reducing packet count. The result is increased network throughput and fast error recovery. However, if an error occurs, the master may not automatically recognize the problem. UDP/IP is suitable for control systems only on closed networks. See the illustration below for UDP/IP encapsulation.
TCP/IP is the most common Ethernet communication protocol. It guarantees that data packets arrive in the correct order, which is necessary for data such as streaming video and music. TCP/IP also assures no packets are lost and it provides congestion control which is important on open networks like the Internet. In control systems that are on closed networks, losing packets is most likely due to an engineering problem such as electrical noise. Congestion is also not a typical problem with closed control system networks because the engineer has complete control over network traffic. TCP/IP is appropriate for large closed networks such as factory automation applications where there is heavy traffic, long cable lengths, and numerous unaffiliated devices. See Figure 1 for TCP/IP encapsulation.
ASCII over UDP/IP
ASCII over UDP/IP is a simple, non-deterministic protocol that communicates using text strings. Communication is as easy as opening the UDP link and sending a string of characters across the wire. It is best used for applications that stream buffered motion commands between one master and one slave in a closed machine. It’s a very reliable protocol for simple applications and does not require third party proprietary software. Galil uses ASCII over UDP/IP for the current generation of software.
ASCII over TCP/IP
ASCII over TCP/IP is a non-deterministic protocol that communicates by sending and receiving ASCII strings between devices. Like ASCII over UDP/IP, one benefit of this protocol is that it can be managed through a Telnet session or a socket, and doesn’t require proprietary software. It also suitable for complex control networks with many devices. It is a good protocol for an open network, although Galil doesn’t recommend open networks for control systems because of the possibility of unauthorized access which can be a problem for the safety of man and machine. Galil uses ASCII over TCP/IP for the current API toolkit, GalilSuite.
Modbus TCP
Modbus TCP is also a non-deterministic protocol and is useful when the application needs to share states of digital and analog I/O, and array data. Once the connection is established between devices, the native programming language can be used. Because Modbus provides an interface to third-party devices, it has a good level of multivendor support. An example of a typical application is a bottling and sealing machine which requires the motion controller to do high-performance, deterministic motor control as well as manage a large amount of remote digital and analog I/O control.
Ethernet/IP
Ethernet over IP, another non-deterministic protocol, was developed using TCP/IP as its foundation. It combines standard Ethernet technologies with the Common Industrial Protocol (CIP) which provides an object-oriented design needed for real-time control applications. It allows devices from multiple vendors to share I/O commands resulting in the consistent implementation of automation functions across a diverse ecosystem of products. Typical applications are factory floor automation, where a PLC is the master connected to multiple motion controllers. The PLC sends target positions to each motion controller, which runs autonomously, and the motion controller reports back to the PLC when the motor is in position.
EtherCAT
EtherCAT, invented by Beckhoff Automation, is based on the CANopen protocol and built on the Ethernet physical layer. It’s the newest deterministic protocol used in control systems, and it’s typically used for applications that require short data update times and precise synchronization. EtherCAT ensures reliable servo-loop closure and is suitable for physically distant drives (long cable lengths).
In the fourth quarter of the 2014 calendar year, Galil will launch an EtherCAT master to control remote drives and motors as if they were local. The slaves are commanded the same as if connected to a local axis which allows the programmer to use Galil’s DMC code programming language. Examples of EtherCAT control systems could be semiconductor tools, packaging machines, and assembly systems where the axis are physically distant from the EtherCAT master.
The Future of Ethernet and Control Systems
What changes to networked control systems can we expect in 2015 and beyond? Will control system networks follow the changes we’ve seen in open networks (internet), such as increased bandwidth and the ever-increasing use of wireless communication?
In motion control networks, packets are fairly regular, simple and small. They don’t require the bandwidth needed for open internet communication so gigabit network speeds don’t benefit control system networks. Today, wireless is not secure enough for motion control applications, although it could become an option if it wireless becomes a safe method of communication for these critical and potentially dangerous control systems. With the increase in the use of internet banking and other private data transmissions, wireless hardware and network providers are focused on making wireless more secure.
‘Internet of things’ is another trend in network communication that could move into control system applications. Smart sensors like potentiometers or accelerometers can transmit data digitally to a host over a wired or wireless network. These sensors are compact, reliable, inexpensive and easy-to-use. In the future, devices in a control system may have to interface and maintain connections over a network to many smart sensors.
In the motion control world, the flexibility and configurability of Ethernet provides a neutral platform for one-on-one or broadcast communication. Engineers can choose an Ethernet protocol that best fits their application. In Galil’s opinion, Ethernet will continue to be the control system’s network protocol of choice for a very long time.