There are two primary causes of strokes. The first is called an ischemic stroke, where a blocked artery cuts off blood flow to an area of the brain. The second type of stroke is called a hemorrhagic stroke, where a burst or leaking blood vessel results in a dangerous clot inside the brain tissue. This intracerebral hemorrhage (ICH) is the deadliest stroke sub-type, with a one-month mortality rate as high as 52%. Due to the potential cortical disruption caused by craniotomy, conservative management (“watchful waiting”) has historically been the accepted method of treatment. With the development ASPIHRE (A Surgical Platform for Intracerebral Hemorrhage Robotic Evacuation) a better method is on the way.
ASPIHRE is the first-ever concentric tube robot that uses off-the-shelf plastic tubes for magnetic-resonance (MR) guided ICH blood clot evacuation. This new technology uses pneumatic motors commanded by Galil’s DMC-4163 six-axis motion controller and an external Festo pneumatic flow control valves. Galil's+/-10V motor command output is externally conditioned to 0-10V for the Festo valves (5V = no flow). The valves provide compressed air to the MR-safe pneumatic motors. These motors are capable of up to 11,000 rpm. To overcome the limited motor torque, 100:1 gear reducers link the motors to the tube feed/rotate mechanisms. Position data is acquired from quadrature encoders mounted after the gear reducers. The concentric tube robot is affixed to the patient skull via a custom-printed mounting bracket. See Figure 1.
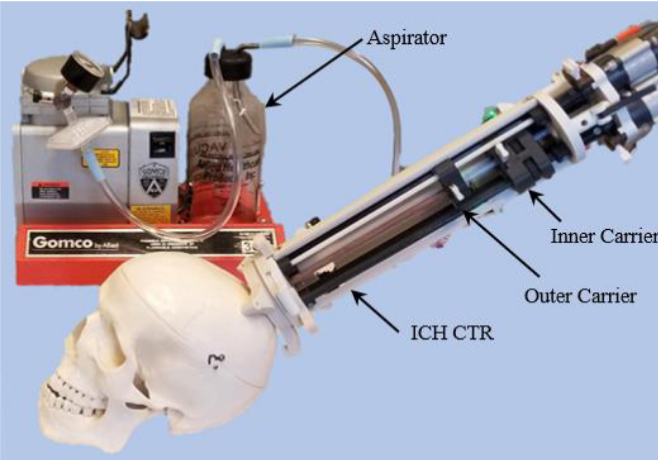
Figure 1 – Proposed MR-Conditional Concentric Tube Robot
The six pneumatic motors rotate and extend the concentric tube robot's inner and outer tubes in order to follow a predetermined path and access the hematoma. An MRI machine is used to visualize the location of both the clot and the concentric tube robot during use. Adjustments are possible along the insertion path. Once the clot is reached, a technician is able to manipulate the robot in such a way to allow suction evacuation of the blood clot.
Prior to the operation, a path for the concentric tube robot is developed based on data from the MRI scans. During the operation, MATLAB software (a programming language and numeric computing environment) uses inverse kinematics to compute motor position data for the Galil DMC-4163. Once position data is calculated, MATLAB transmits a sequence of PA commands to the Galil to ensure a safe motion path. The straight outer tube is first put into position, followed by the curved inner tube. Due to the physical characteristics of the concentric tube robot, it is also necessary for MATLAB to use encoder data from the Galil to dynamically adjust PID motor tuning values at 100 Hz based on a user-developed outer control loop. Real-time adjustments to the concentric tube robot's position are determined by a lab technician as they monitor the operation in MRI scans. See Figure 2.
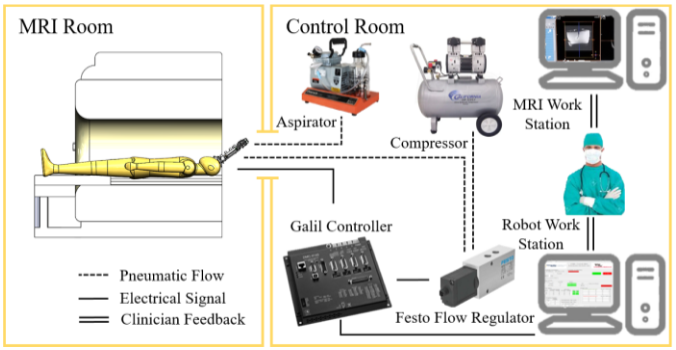
Figure 2 – Procedural Setup in the MRI Scanner and Control Room
The goal of this very important project is to create a system that not only results in adequate evacuation of a blood clot, but also reduces the destruction of adjacent brain tissue. The ASPIHRE team has demonstrated the efficacy of this technology with a gelatin test subject. While there is still work to be done before the technology moves to a clinical trial stage, the results are promising!