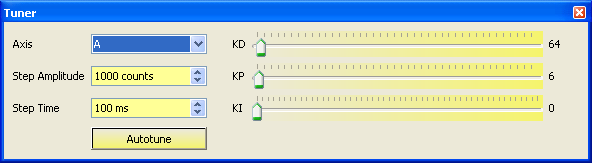
The Autotune button automatically chooses optimal PID values by putting the selected Axis through a series of predetermined movements (which may cause the motor to buzz) and finally shows a Step response of the specified Amplitude and Time. Autotune can provide accurate results; however, manual tuning is often also required.
|
| Servo Tuning Utility |
Manual tuning can be accomplished on the selected Axis by clicking on the PID sliders, which causes a step response whose Amplitude and Time (pulse width) can be adjusted to suit mechanics. If Step Amplitude is set to zero or a program is running in thread 0, the sliders will adjust the PID values without performing a step response, allowing a user program to be run. To manually tune an Axis, place the Scope in Repeat Mode, select desired Scope Sources, and slide the PID sliders to see the change in response.
The following are screenshots of using the Scope and Tuner to manually tune a servo.
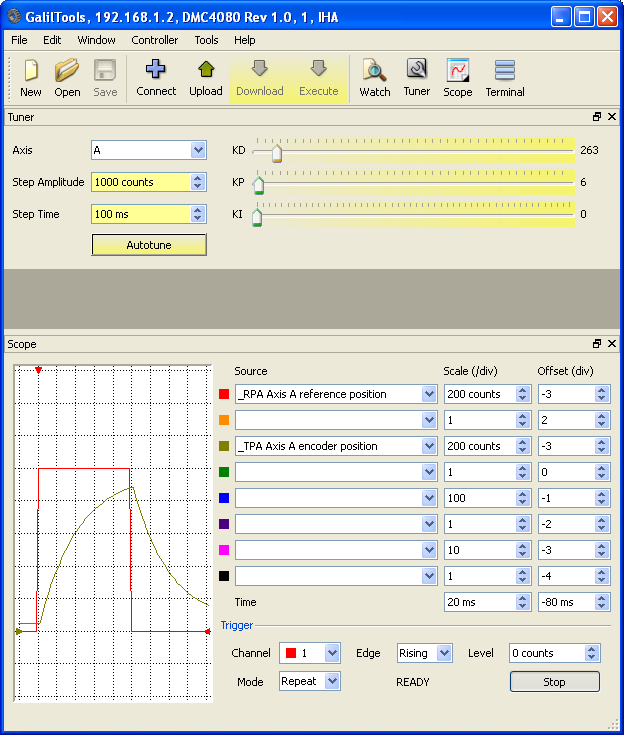 |
| Overdamped System (poorly tuned) |
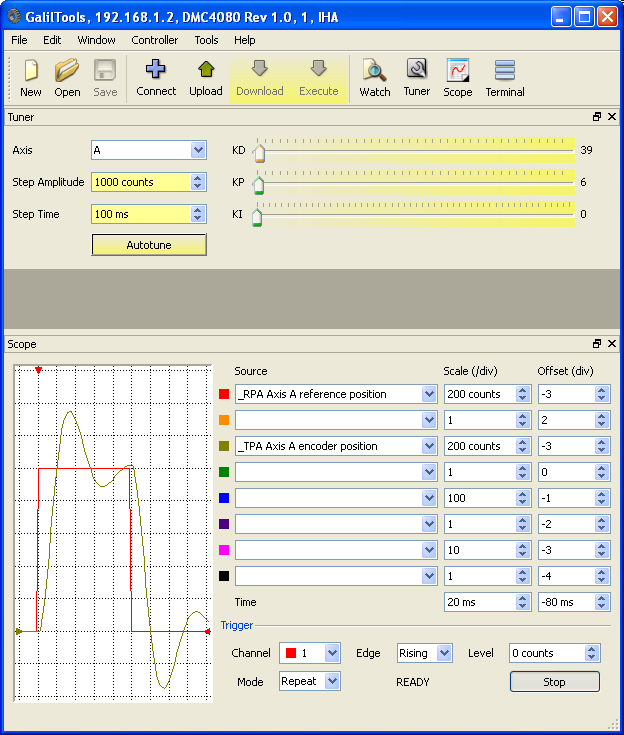 |
| An underdamped system with ringing (poorly tuned) |
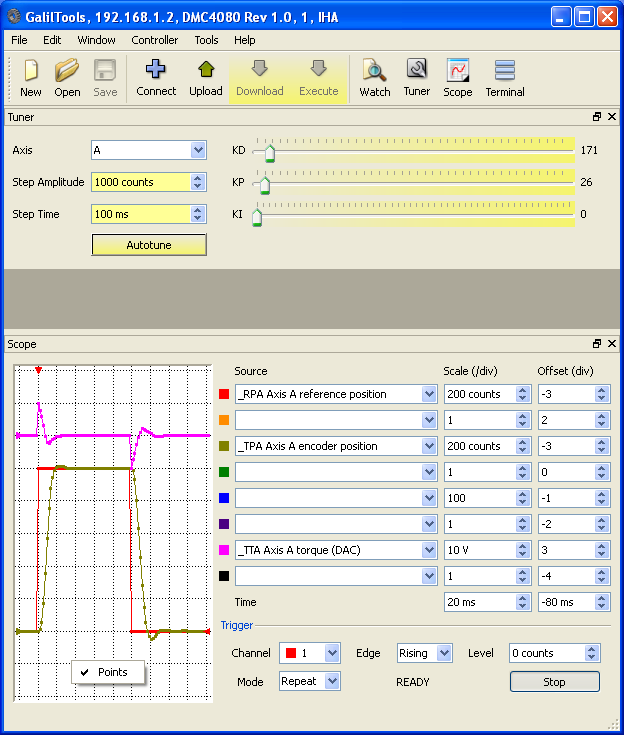 |
| A critically damped, well tuned, system with minimal overshoot. Note the _TTA channel was added after the step response generation (all Scope Sources are recorded and available for later analysis). |