All Application Notes
Application Note #2442
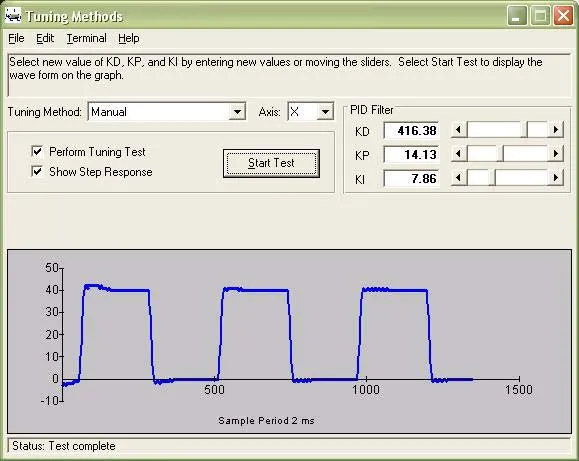
Tuning with PL (Pole) and PID
Learn how to optimize servo system performance using PL (Pole) filter in combination with PID tuning parameters. This application note explains how to manage high-frequency resonances and noise in closed-loop servo systems when standard PID tuning isn't sufficient. Includes mathematical formulas, break frequency calculations, and practical examples demonstrating how the low-pass pole filter reduces oscillatory errors in high-speed motion control applications.