Application Notes
Browse our library of technical application notes covering servo tuning, motion programming, communication protocols, and more. Each note provides detailed guidance for implementing specific features with Galil controllers.
Modes of Motion: Electronic Cam
A practical guide to Electronic Cam (ECAM) mode on Galil controllers. This application note walks through the full setup workflow — defining the master axis (EA), cycle length (EM), table interval (EP), and slave positions (ET) — using a conveyor-belt labeling and kicking system as a worked example. Also covers advanced features including on-the-fly phase shift correction and the EW command for re-allocating table resolution to curved profile segments.
Modes of Motion: Electronic Gearing
A practical guide to Electronic Gearing on Galil controllers. This application note covers how to configure Master and Follower axes with the GA and GR commands, including the five Master types supported (main encoder, auxiliary encoder, commanded position, vector plane, and virtual axis), along with on-the-fly gear ratio changes and superimposed Follower motion. Also covered: ramped gearing via the GD command with _GP-based catch-up moves, and Gantry Mode (GM) for keeping paired axes synchronized through stop commands and limit switches.
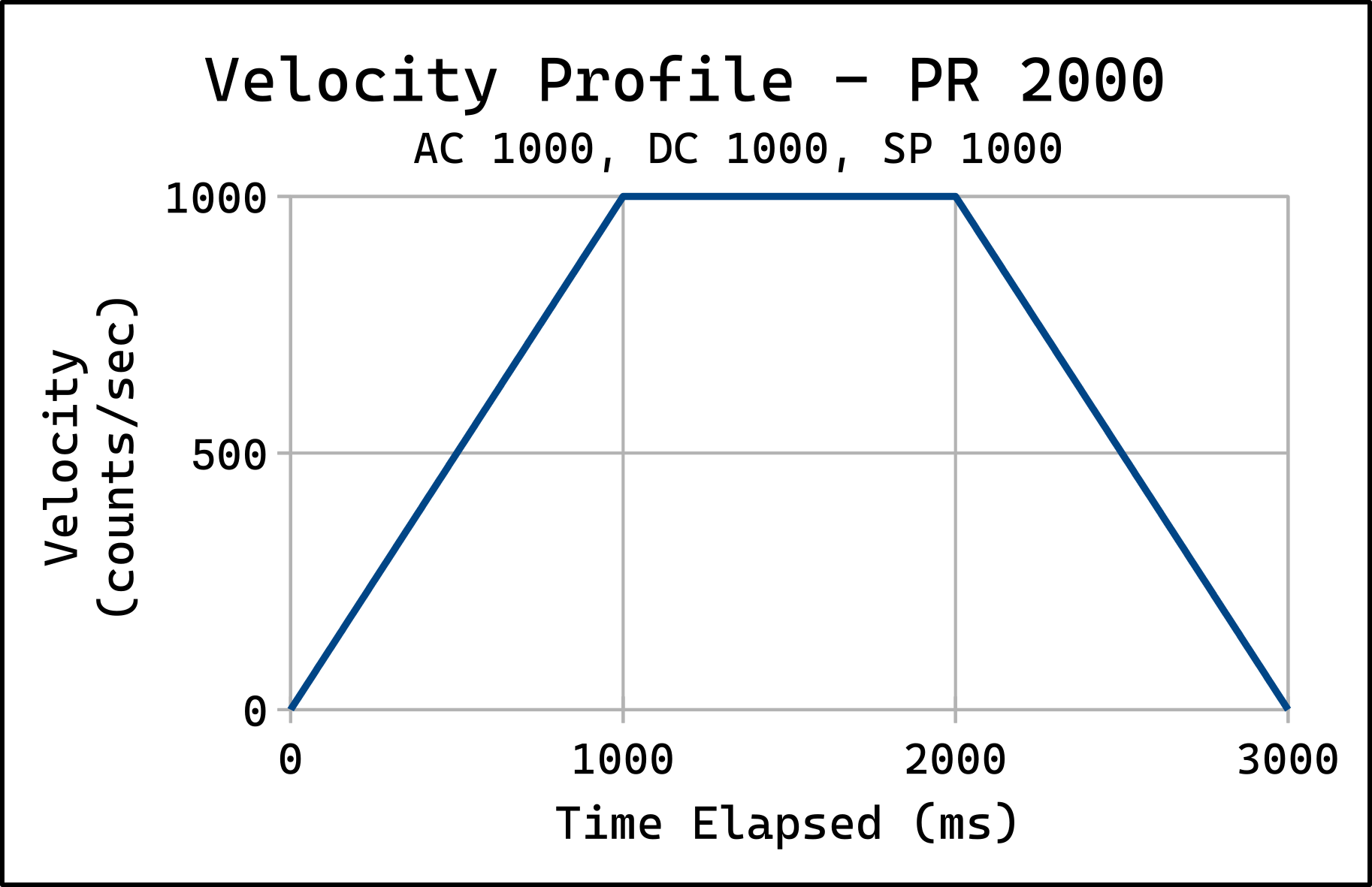
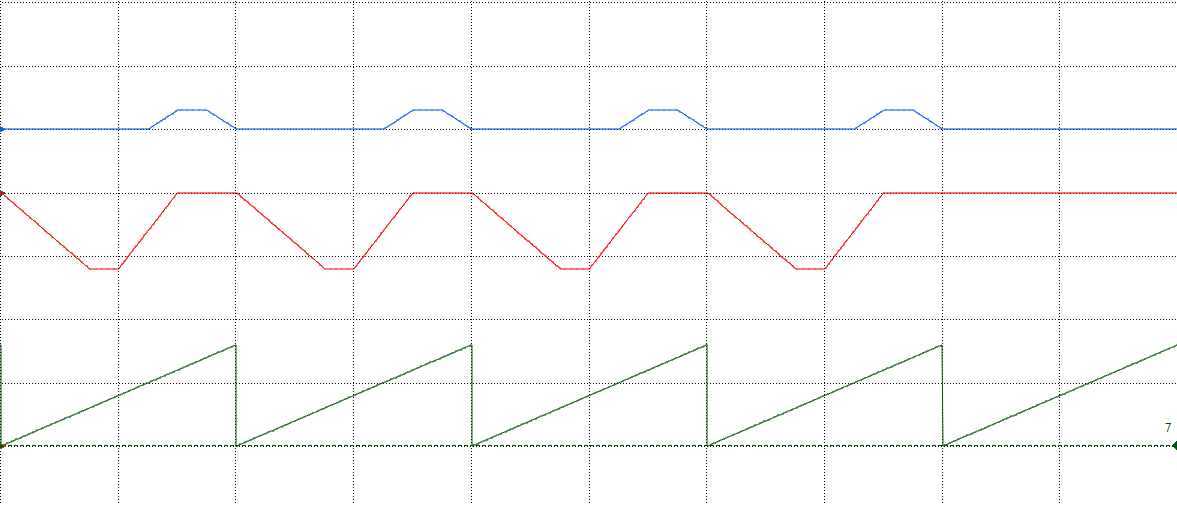
Modes of Motion: Independent Axis
A practical guide to Independent Axis motion on Galil controllers. This application note introduces three core modes — point-to-point positioning (PA, PR, IP), independent jogging (JG), and Position Tracking (PT) — along with the AC, DC, SP, and IT parameters that shape each motion profile. Includes command syntax, example programs, and velocity/position plots for single- and multi-axis use cases.
Modes of Motion: PVT/Contour Mode
A practical guide to following arbitrary position-vs-time profiles on Galil controllers. This application note covers two complementary modes: PVT (Position, Velocity, Time) for segments longer than 16ms, which uses third-degree polynomial interpolation to ensure continuous acceleration, and Contour Mode for segments shorter than 16ms, which uses linear interpolation for tight time intervals. Includes full DMC examples — a parabolic PVT velocity profile and a teach-and-playback Contour application — plus command summaries for both modes.
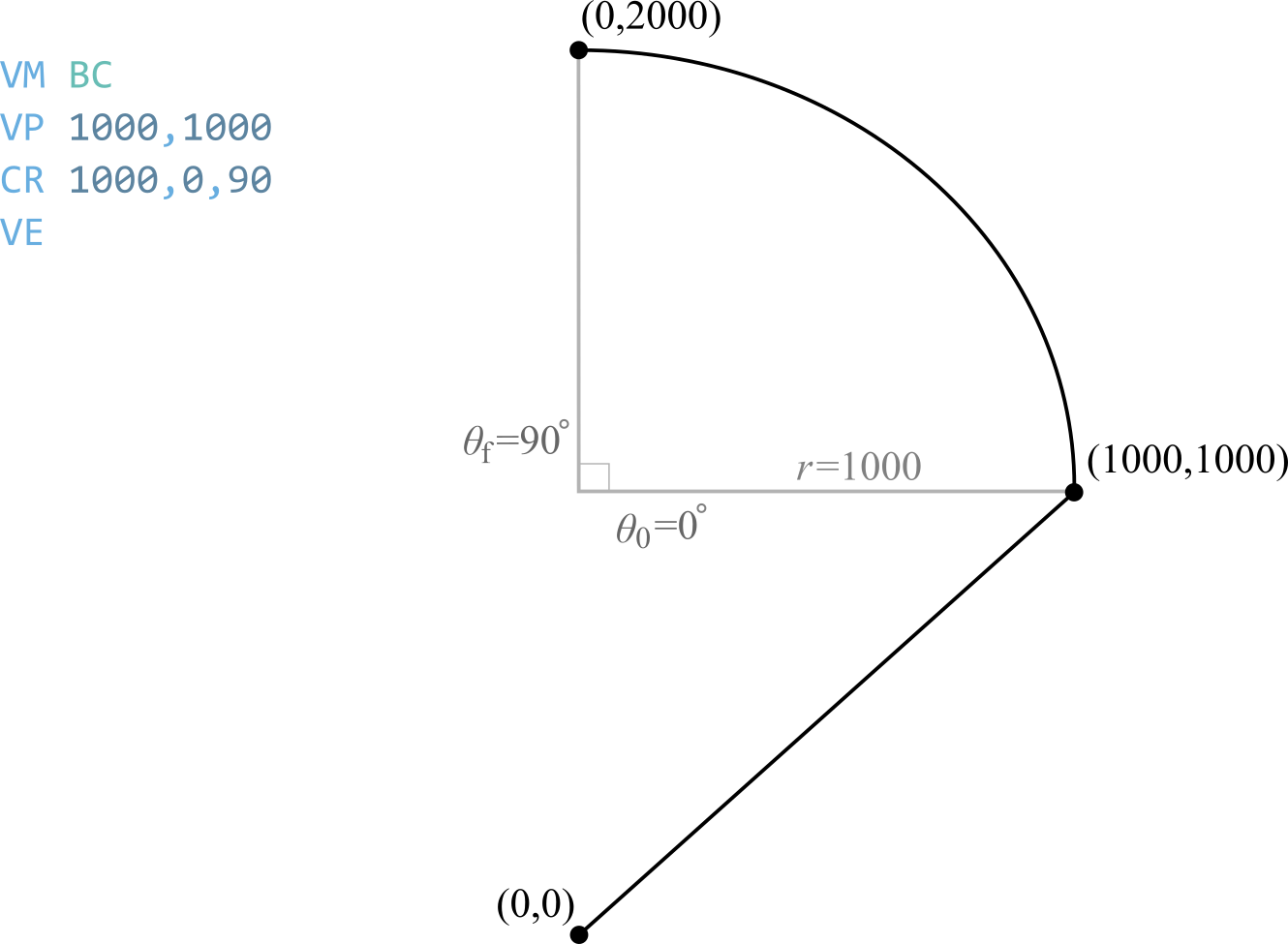
Modes of Motion: Vector and Linear Interpolation
A practical guide to coordinated multi-axis motion on Galil controllers. This application note covers vector mode (2-axis paths with straight-line and arc segments, plus an optional tangent axis) and linear interpolation mode (straight-line paths across up to 8 axes), along with the shared infrastructure both modes use: the FIFO segment buffer, VS/VA/VD path speed control, per-segment start/end velocities, dual coordinate planes, and AV trip points. Includes command summary tables and three annotated DMC examples.
H-Bot Firmware Setup Guide
Learn how to configure and implement Galil's special H-Bot firmware for two-axis gantry systems. This guide covers inverse kinematic transforms that convert Cartesian X-Y coordinates to motor displacements, proper axis configuration, homing procedures, and scaling calculations for H-Bot motion control systems using servo motors.
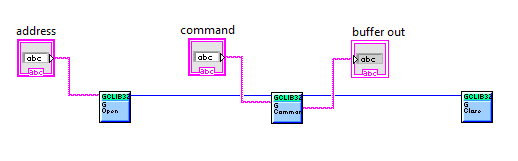
Using gclib with National Instruments LabVIEW
Learn how to integrate Galil's Communication Library (gclib) with National Instruments LabVIEW 2020 and 2021 for both 32-bit and 64-bit versions. This technical guide provides step-by-step instructions for installing gclib, accessing the 15 supported gclib functions within LabVIEW's graphical programming environment, and building VI programs for motion control applications. Discover how to combine gclib's versatility with LabVIEW's simplicity to create functional graphical user interfaces for a wide range of motion control projects.

BiSS Encoder Setup Guide for Galil Motion Controllers
Learn to configure Bidirectional Serial Synchronous (BiSS-C) absolute encoders with Galil motion controllers. This guide covers BiSS protocol fundamentals, wiring connections, encoder modes (absolute vs continuous), error handling, and practical configuration examples using SS, SY, and SE commands for precise motion control applications.
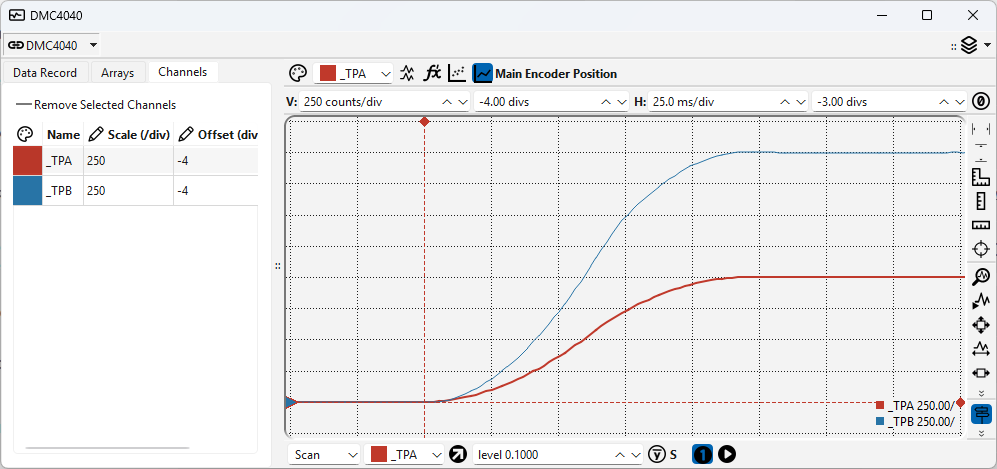
Closed Loop Stepper Firmware Setup and Tuning Guide
Learn how to configure and tune Galil's Closed Loop Stepper (CLS) firmware for optimal stepper motor control with encoder feedback. This guide covers system setup, motor configuration, tuning parameters including KP, FV, and FA gains, and real-time performance optimization using GDK Scope Tool. Essential for engineers implementing precision motion control with stepper motors in applications requiring feedback-based positioning accuracy.
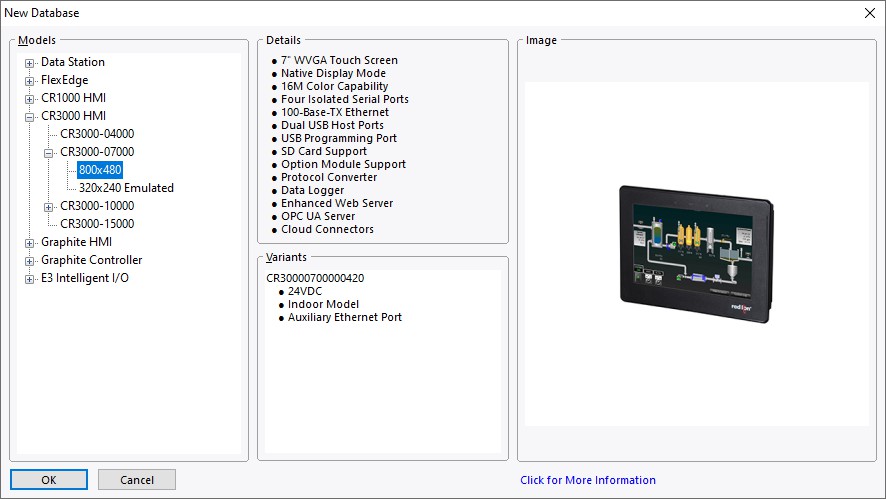
Modbus TCP/IP Communications with a Red Lion HMI
Learn to configure Modbus TCP/IP communication between Red Lion CR3000 HMI and Galil motion controllers (DMC-4000) and PLCs (RIO-47000). This guide covers software installation, device configuration as Master/Slave, data tag mapping, and HMI interface setup for reading/writing controller data over Ethernet networks.
Power Supply Sizing for Motion Control Applications
Learn how to properly size power supplies for servo motor applications by calculating peak and continuous power requirements. This guide covers the essential motor parameters, voltage and current calculations, and includes practical examples with BLM-N23 brushless motors. Engineers will understand how to evaluate intermittent vs continuous power needs and select optimal supply voltages for cost-effective wire sizing.

SSI Encoder Setup Guide for Galil Motion Controllers
Learn how to configure Synchronous Serial Interface (SSI) encoders with Galil motion controllers. This guide covers SSI protocol fundamentals, wiring procedures, absolute vs continuous mode selection, status bit handling, and troubleshooting techniques. Essential for engineers implementing absolute encoder feedback systems in motion control applications.
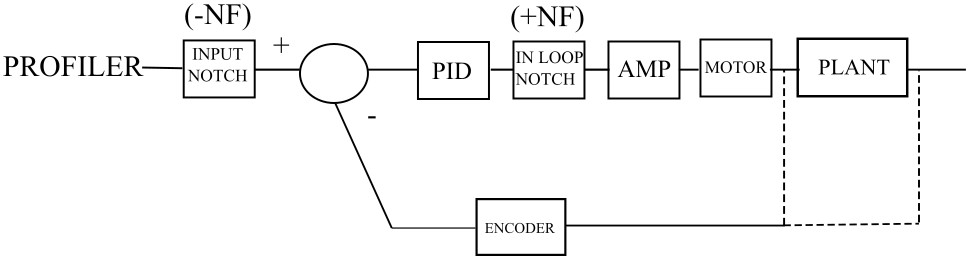
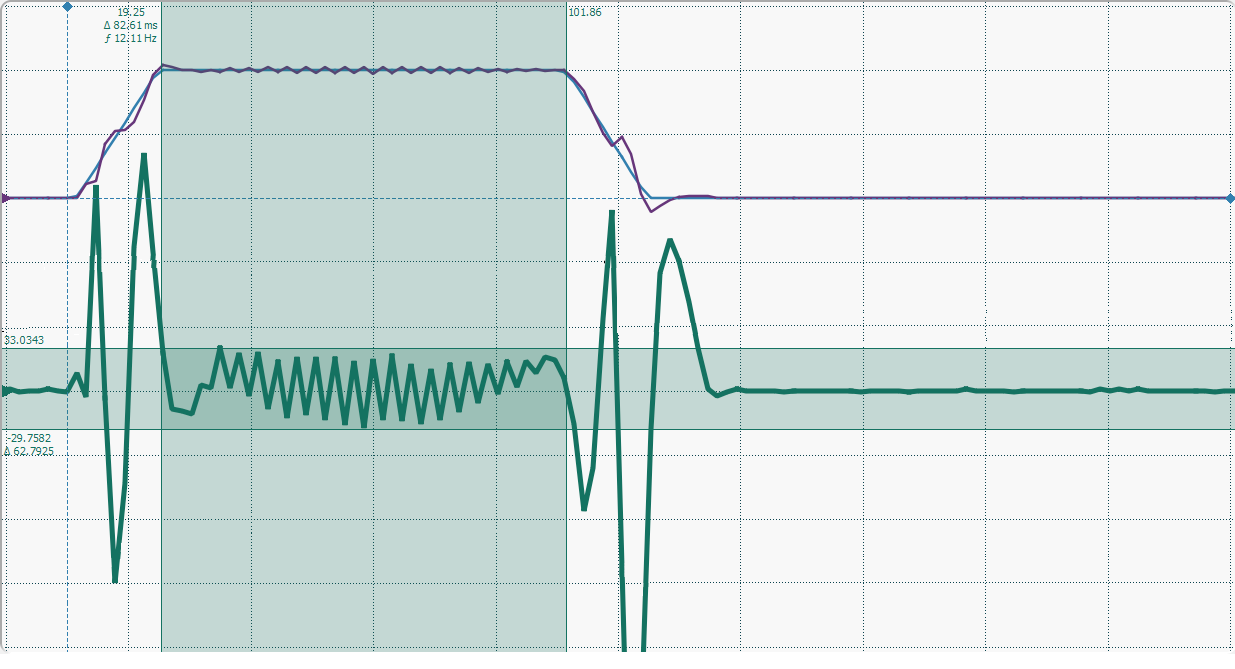
Using Notch Filters to Mitigate Resonance
Learn how to implement notch filters to control mechanical resonances that can destabilize motion control systems. This guide covers resonance fundamentals, filter placement strategies, and practical configuration using Galil DMC controller commands. Includes real-world examples for both high and low frequency resonance scenarios with step-by-step implementation techniques.
Connecting a Balluff BML S1G BiSS Encoder to a DMC-40x0
Learn how to integrate a linear Balluff BML S1G BiSS encoder with Galil's DMC-40x0 motion controller. This technical guide covers BiSS protocol configuration, proper wiring connections, encoder setup using Balluff's configuration tool, and DMC-40x0 command parameters. Essential for engineers implementing high-precision position feedback systems with bidirectional serial synchronous interfaces.
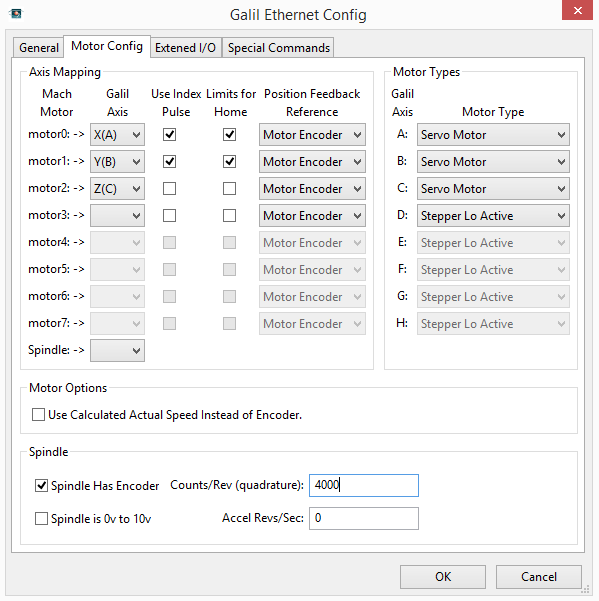
Using Mach4 Drivers with Galil Motion Controllers
Learn how to configure NewFangled Solutions' Mach4 CNC software to interface with Galil DMC-4000 and DMC-41x3 series controllers. This guide covers installation of the Galil plugin, network configuration, machine profile setup, and switching from simulation mode to live control. Engineers will discover step-by-step instructions for creating a cost-effective CNC software solution using standard G and M-codes with Galil controllers.
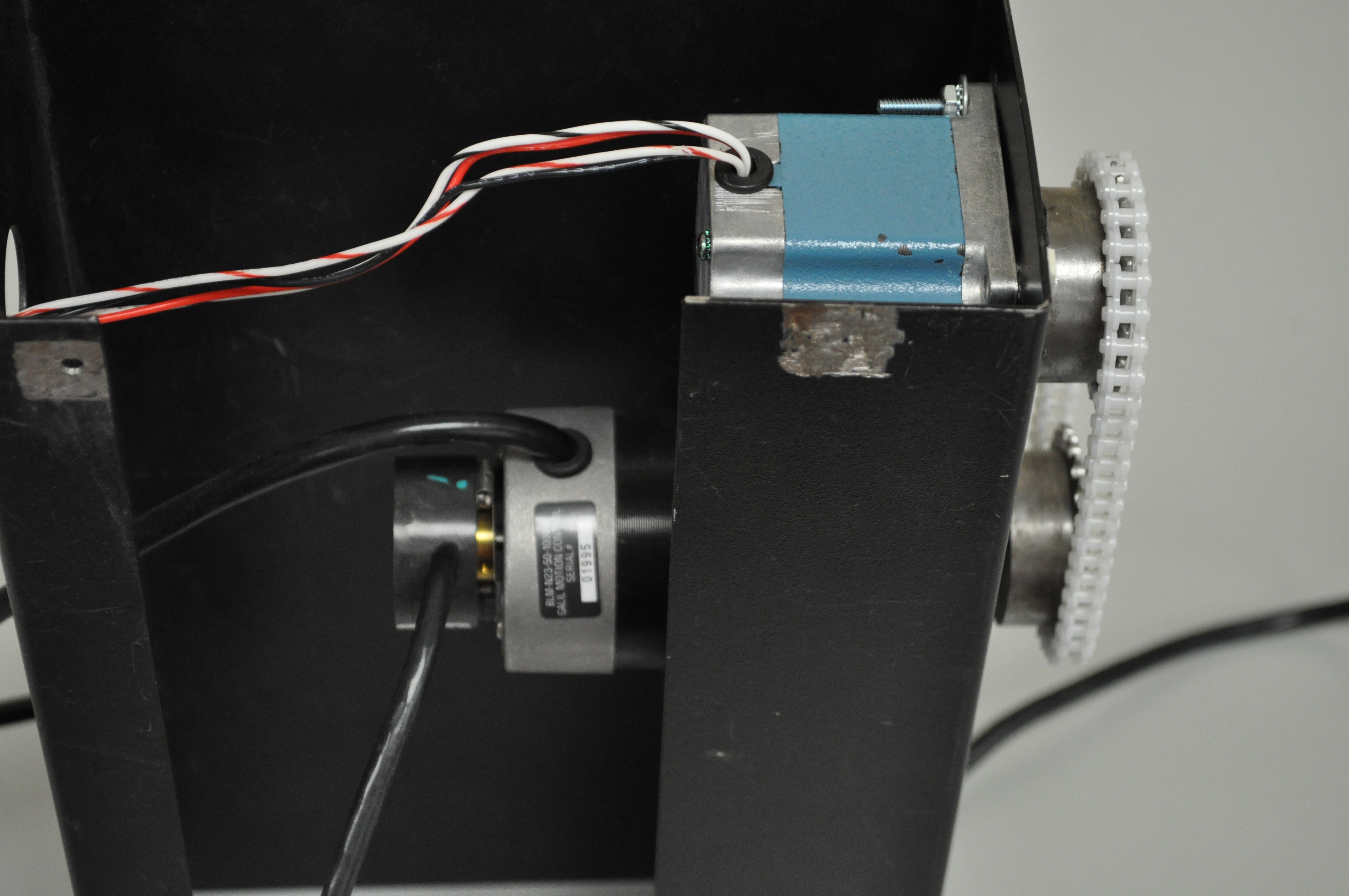
Positioning a Stepper Motor Using Encoder Feedback on an Axis With Non-Linear Mechanics
Learn how to implement closed-loop stepper motor control with encoder feedback to overcome backlash and compliance issues in non-linear mechanical systems. This application note covers tuning parameters including proportional and integral gains (KP, K1, KI, K2), deadband settings, and step-by-step configuration procedures for DMC controllers with internal or external stepper drives. Ideal for applications requiring accurate endpoint positioning despite mechanical imperfections like leadscrew backlash or timing chain compliance.

CABLE-100-1M Dimensions and Connection Guide
Learn the specifications, dimensions, and pinout configuration for the CABLE-100-1M interconnect cable used with Galil motion controllers. This guide covers the cable's physical characteristics, proper connection methods to amplifier and breakout boards, and essential wiring information for motion control system integration.
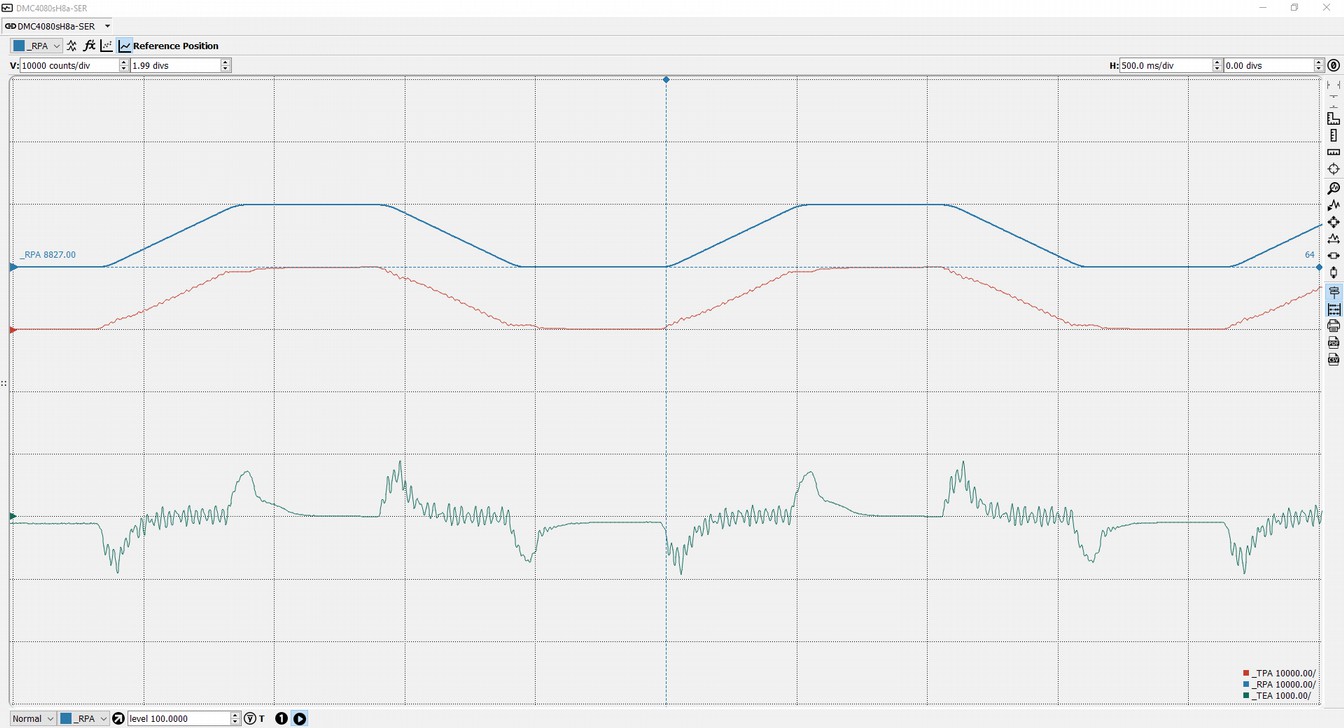
Tuning a Piezomotor DMC-30019 and LEGS Piezoelectric Motor for High Resolution Motion Control
Learn how to achieve nanometer-level positioning accuracy using Galil's DMC-30019 controller with LEGS piezoelectric motors. This application note demonstrates tuning methods for overcoming the non-linear characteristics of piezoelectric motors, showcasing step-and-settle performance within ±5 counts (25nm) and dynamic following error of ±35 counts (175nm) during motion. Includes hardware setup, tuning procedures using GDK scope tools, and performance data for both loaded and unloaded conditions.
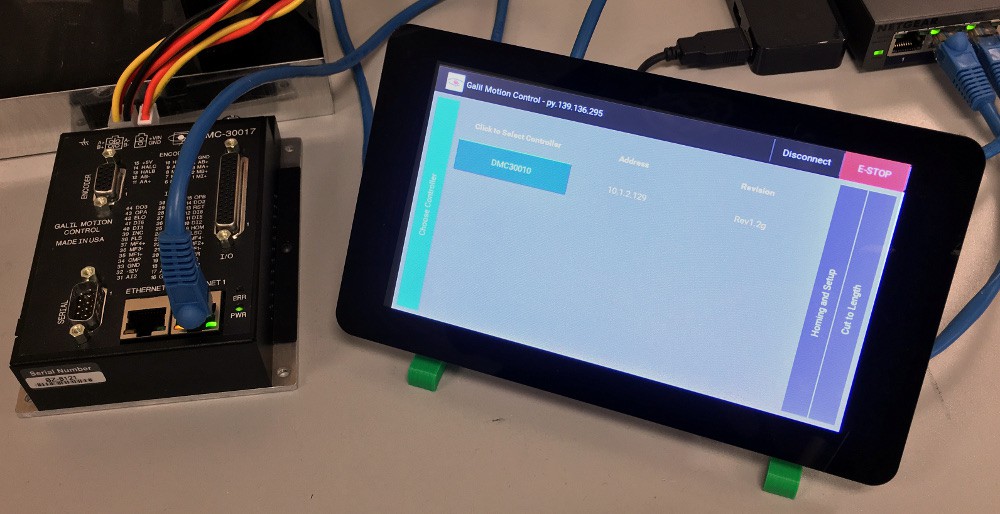
Raspberry Pi Interface with Galil Controllers
Learn how to create a cost-effective HMI solution using Raspberry Pi with Galil motion controllers. This application note demonstrates building a touchscreen interface for under $100 using Python, Kivy framework, and Galil's gclib API. Covers controller selection, axis homing, servo control, and a complete cut-to-length application example.
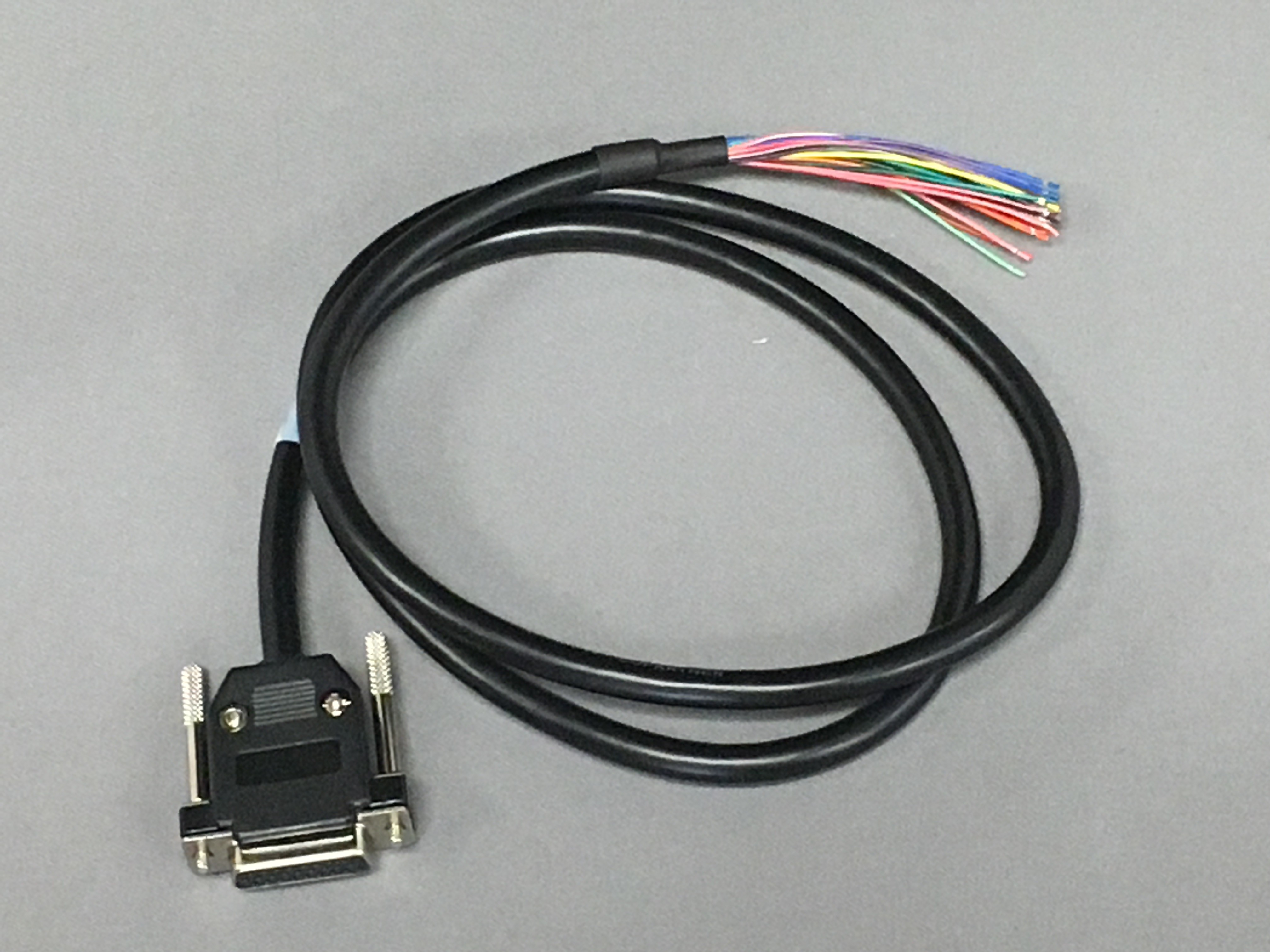
CABLE-26F-1M Pinout and Color Code Reference
Essential pinout and color code reference for Galil's CABLE-26F-1M cable assembly. This application note provides the complete pin-to-wire color mapping for proper installation and troubleshooting of the 26-pin cable used in Galil motion control systems. Engineers will find the detailed color coding table necessary for field wiring and system integration.